 您的当前位置: 中国锻压网 > 资讯中心 > 正文
您的当前位置: 中国锻压网 > 资讯中心 > 正文|
当前,EEA从功能域跨入物理域,形成“中央+区域控制”架构;功能域进一步深度融合并升级成为中央计算平台+区域控制,区域控制器 (ZCU)应运而生并统筹管理区域各部件。 中央+区域的架构模式,已成为未来行业内主流趋势。区域控制器逐步取代了单独的车身域控制器功能,从基于信号转向基于服务的模式。2023年9月21日,在盖世汽车主办的2023第三届智能汽车域控制器与中央计算平台创新峰会上,合众新能源智能化研究院数字架构部高级总监侯亚飞表示,区域控制器将是近3-5年的竞争热点,中央计算芯片也将加速落地......总结而言,中央+区域架构下的挑战和机遇,将包括合作模式的变化、软件开发和集成、敏捷VS工具流程、算法、芯片、操作系统、舱驾安全和舒适等。  侯亚飞|合众新能源智能化研究院数字架构部高级总监 以下为演讲内容整理: 智能汽车发展行业趋势 中国的新能源汽车随着国家政策的扶持以及本身新能源的发展,大部分智能技术用在了新能源汽车上,很少有燃油车出现新技术,不管是区域化、中央+区域架构、L2++自动化驾驶,还是孵化功能,基本上都在新能源上体现。新能源销量增长也反哺了智能汽车的发展,这是主要的趋势。在2023年8月慕尼黑车展上,中国新能源汽车的“内卷”候能力提升,低碳,智能,多元成为中国新能源汽车行业的代名词。 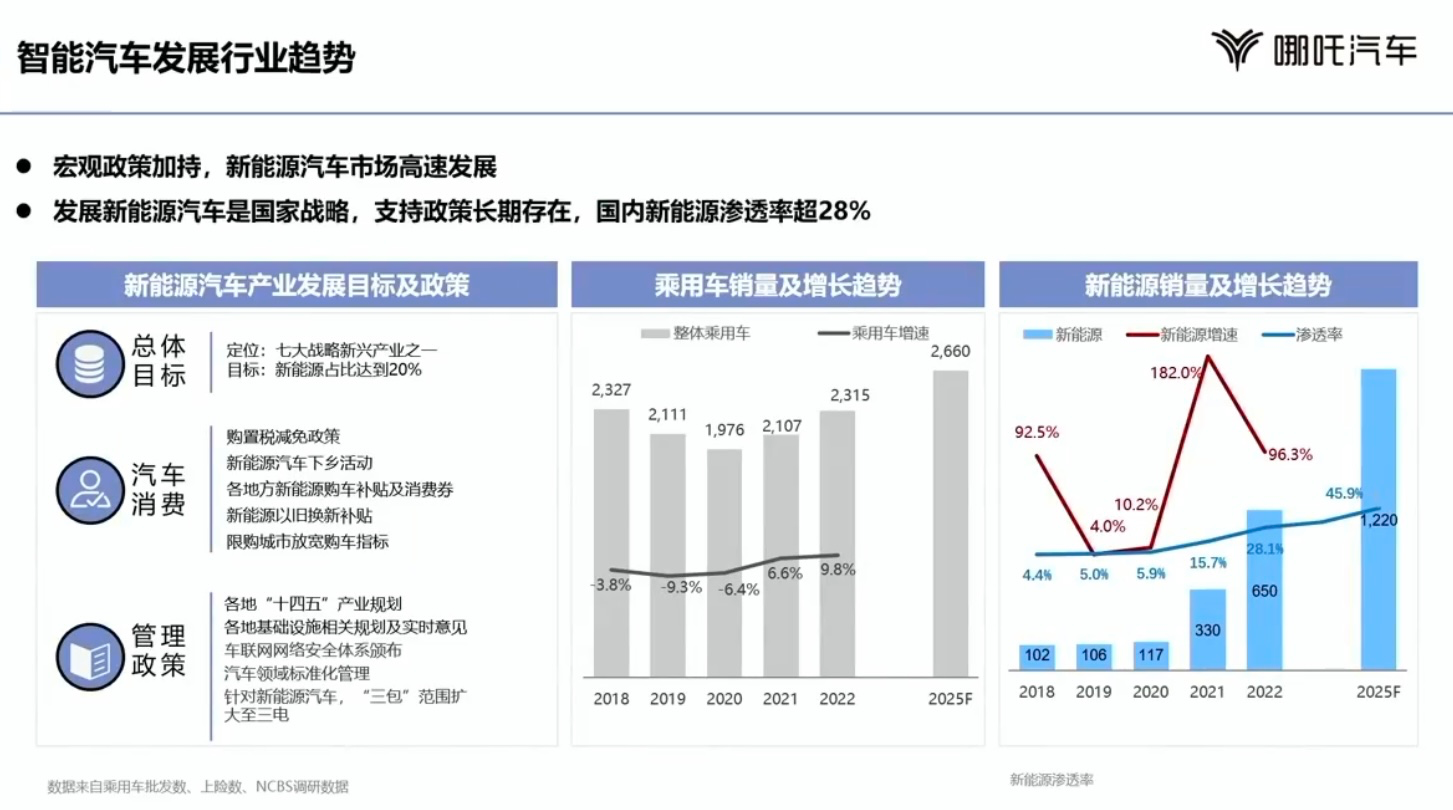 图源:演讲嘉宾素材 中央计算+区域控制发展趋势 架构的发展趋势从传统功能域的形式逐渐到物理域,形成中央+区域的架构形态。本身功能域进一步深度融合并升级成为中央计算平台+区域控制,区域控制也产生区域管理、区域配电和区域的服务化。整个架构的发展为什么这么快?是因为摩尔定律,芯片发展很快反推架构平台产生新的变化。如果没有芯片的快速发展,就没有当前芯片的演变。 第一代分布式电子电气架构是一个功能对应一个ECU,第二代可以域融合,把很多功能域集成到一起,再往后第三代是中央+区域的计算,然后到云计算。域架构里车身域,智驾域,座舱域+中央网关构成域架构的形态。再到中央+区域,一个中央计算平台加几个区域控制器。可以看到架构的发展很快,高算力SOC、高性能的交换机和服务化的技术推动了架构的发展。如果没有这些,架构发展会遇到短板,很难发展这么快。 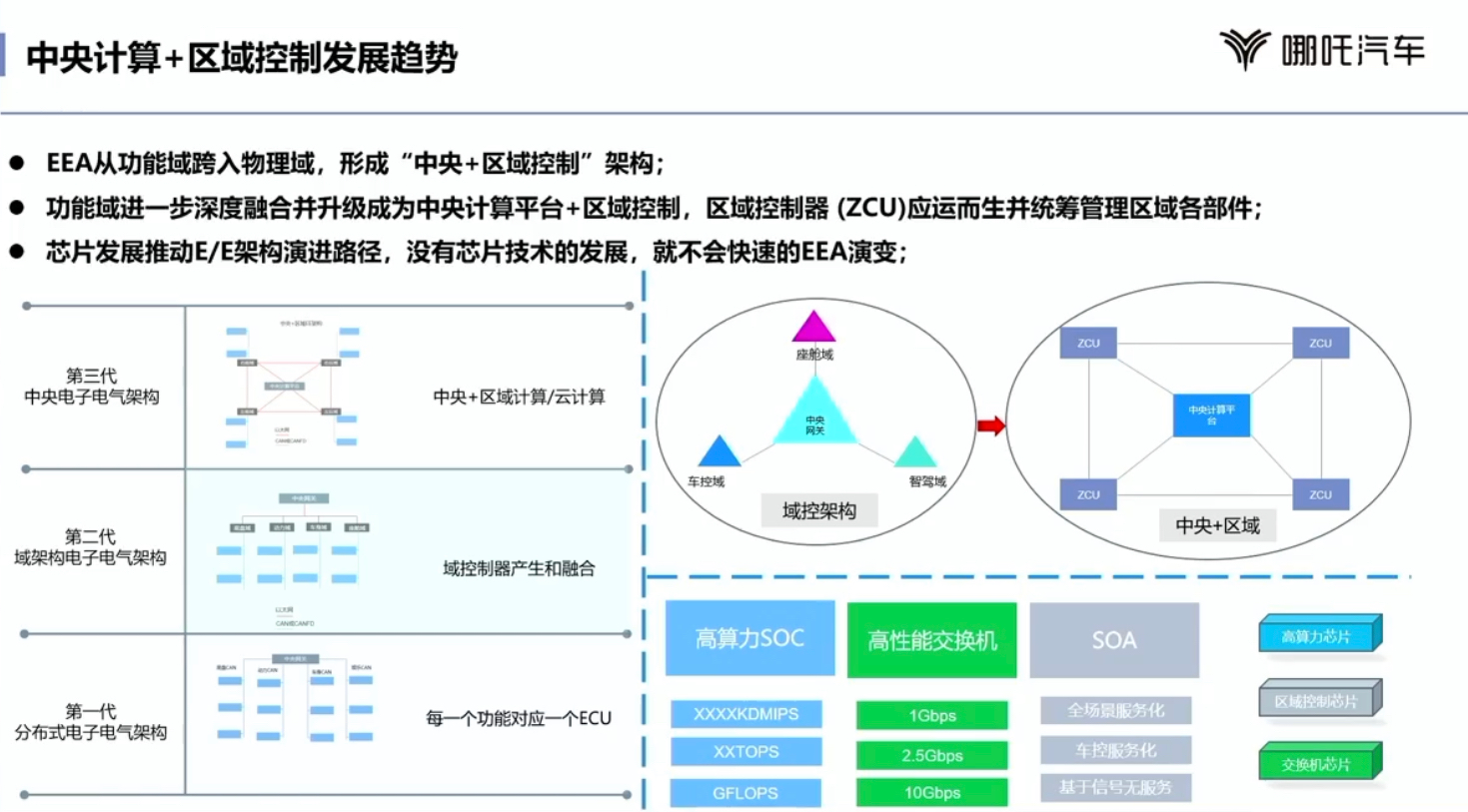 图源:演讲嘉宾素材 中央+区域的控制器已经成为行业内主流的趋势,区域控制器逐渐取代单独的车身控制功能,逐步基于信号服务转向基于服务的模式。未来小鹏,长安,理想,一汽,长城,小米,特斯拉基本上在走区域路线,有可能是两个或多个,分布的位置不一样。为了降低成本,把区域控制器做成标准的控制器,涵盖高中低的配置。比如控制器基于同一个硬件,同一个接口适配不同的车型达到降本。 基于信号和基于服务对终端消费者会产生什么好处?不管基于信号还是基于服务,对终端消费者的感知不是那么强,但是对于开发,对于软件快速的迭代和验证的周期是有好处的。我认为基于服务对开发的模式和开发的验证周期是很好的快速迭代。新的架构产生,服务化场景的需要,包括大算力SOC,舱驾一体,软硬件的解耦,是行业内标准的趋势,实现软件的快速迭代。 当前面临的机遇和挑战 为了解决这些问题,各个主机厂都在自研,未来主机厂由买方变成软件的研发方,对软硬件解耦,国内外主机厂建立自研的机构对软硬件进行自研和联合自研。自研是很重要的,要实现车型的差异性、个性化和体验感,要快速做软件的迭代,能力的适配包括能力的建立。行业内的技术已经成熟了,比如芯片算力都在200K以上,AR算力到256tops,软件AP、CP和SAP的技术推动中央+区域技术快速落地。中央计算平台以前是域和域物理的,现在变成功能融合。 基本的环境和条件已经具备走向中央+区域,成本诉求也是中央计算平台发展的催化剂。芯片+软件算法+工具链逐步成为后期中央计算平台+区域开发的主流方式,工具链和软件算法已经诞生出很多软件算法公司,未来的合作方式是芯片+工具链+软件算法+OEM+Tier1概念五合一,解决敏捷快速的开发模式。 未来主机厂逐步向操作系统和中间件布局,打通软硬边界。硬件+BIP模式开发逐渐趋于联合开发+代工模式,主机厂建立工具链和自己的开发平台,构建二次自主开发的能力,实现快速迭代。把硬件接口、信号接口、硬件架构和操作系统联合中间件,包括算法API逐渐掌握能力。以前主机厂和芯片供应商更多依赖于Tier1,Tier1把这些东西整合,统一提供给主机厂。未来方式由单线形式变网状形式,形成生态圈,由单一链条式的开发模式逐步过渡到网络的开发模式,逐渐构成大的开发生态链,主机厂、Tier1、芯片和算法公司形成生态链。 除了主机厂和供应商之外,未来跨界的生态会融入到里面,比如第三方生态也会加入到开发中。会提供除了本身车控需求之外,打通第三方通信的需要,和物联网、家具设备未来也会在这方面敏捷开发。车的功能开发到极致了,再开发也是那个功能。灯光做的再漂亮,雨刮、空调做的再好,已经到极致了,车本身的功能就这么多,为了体现差异性只能跨界,跨界才能体现出车的差异性。未来通过跨界的方式体现出车的差异性,跨界生态也会逐渐融入到整车的生态里面,因为车的功能已经到瓶颈期了。 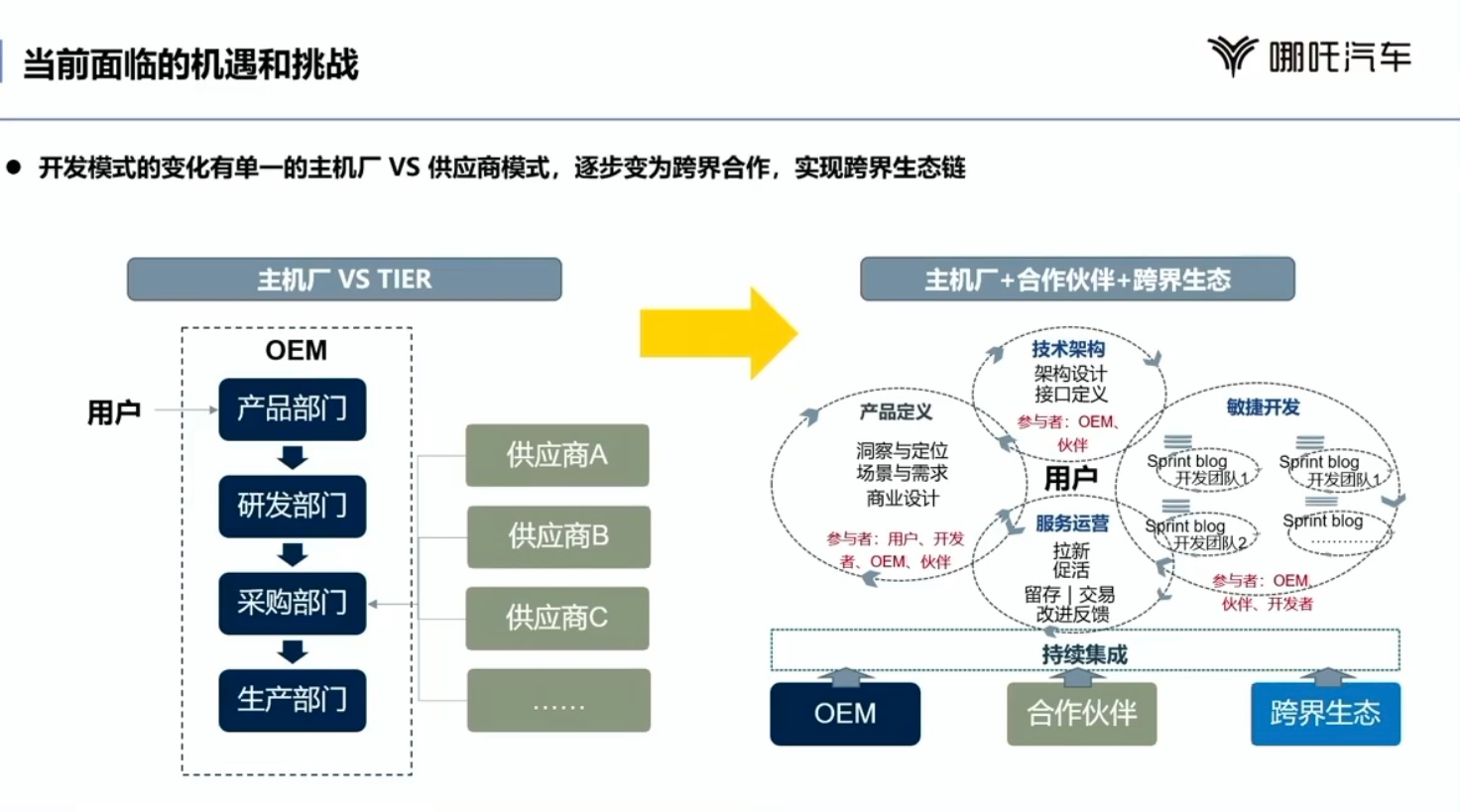 图源:演讲嘉宾素材 不管是自动驾驶、云还是车辆控制,有很多软件模块。主机厂已经把模块开放了,有些可以联合开发,有些可以单独去买或者自研,主机厂自研算法的能力也在提高。以前单独的模式现在走到多元化的开发模式,主机厂也在掌握开发的实力,包括软硬件迭代的能力。我们采用分域的基于功能的开发转向中央计算+分层+分域,端云控制实现生态链服务,有供应商开发的,也有主机厂开发的,也有买别人的。 舱驾一体等级基本上在L2、L2+、L2++,算力在1tops-5tops的可以实现车道保持、基本的L功能、遥控泊车、自主泊车和360环视的功能。L2+可以实现高速领航的辅助驾驶,L2++可以实现城市NCP,256升到1000tops的算力。舱驾融合本身成本、灵活度和舱驾分离存在兼容的问题。舱驾一体的问题基于算力、安全和多OS的集成难点,要体现出娱乐性和舒适性,要有系统性的平衡,需要在安全和娱乐以及舒适方面,在新的环节下开发。 敏捷开发是局部的功能和局部的范围之内的开发模式,比如从P0到P5的开发模式。下面还有零部件的开发模式,比如从硬件需求开发到硬件架构设计,到PDB,到仿真,到功能集成链条,到功能安全架构,信息安全、功能安全的开发模式用在下一步需要做的里面。在未来的模式里,不单单只有整车的开发模式,在小的环境里也会有开发模式,整个大的开发模式很复杂。 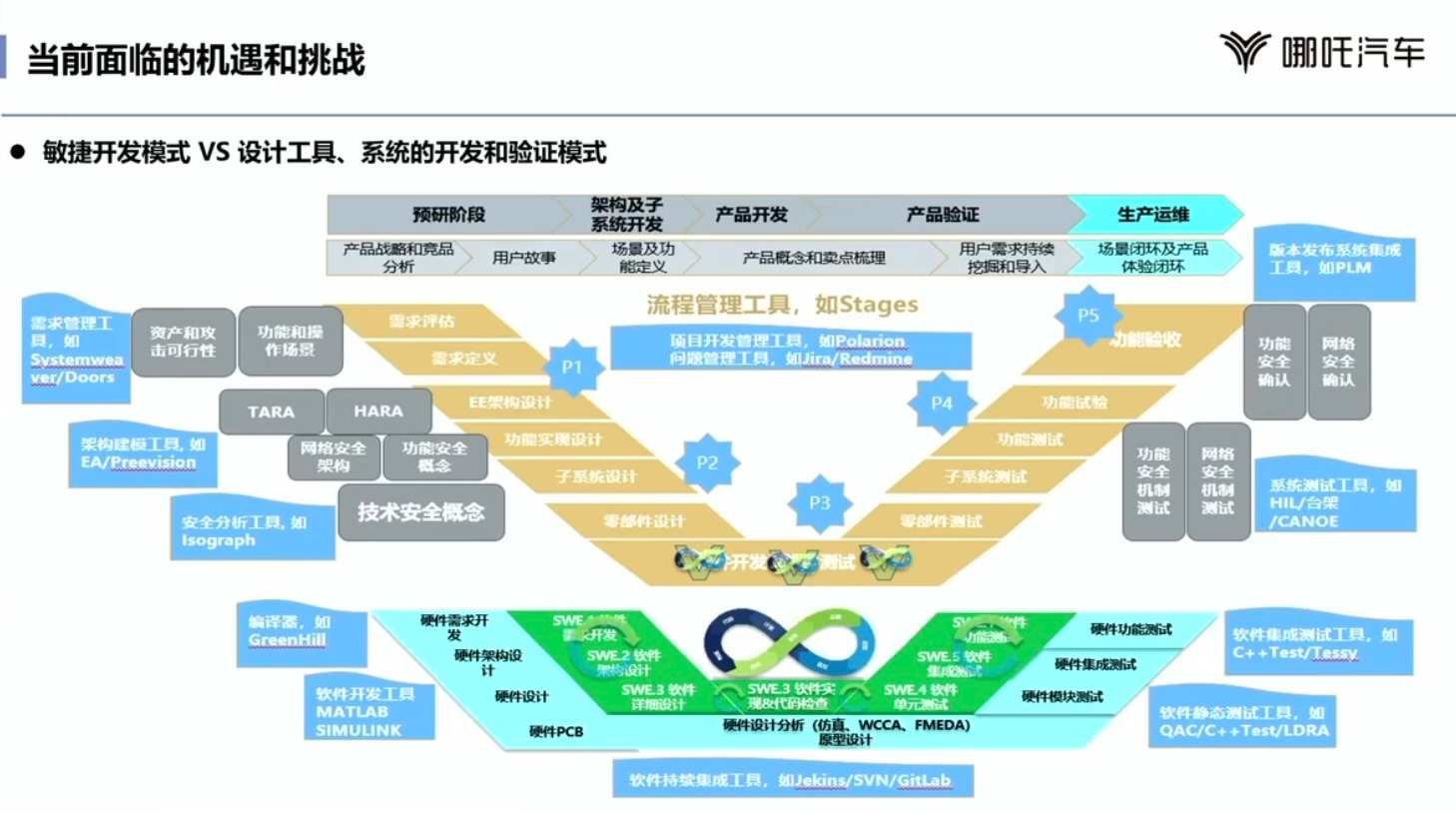 图源:演讲嘉宾素材 未来高速的以太网、MAP、DDS和TSN等,行业内基本都在做这方面的开发,针对以太网的应用、TSN技术、通信中间件和以太网的能力,我们也做了一些服务化。服务化本身要定义好IP的接口、底层的框架,每家的方式都大同小异,没有特别差异的地方,都基于同一套标准的中间件、IPR接口类型、场景定义和开发模式。 整个开发基于大带宽通信开发和以太网本身的能力提高,可以保证区域的信号,未来真正的区域控制器会把毫秒波雷达、摄像头和激光雷达接入到区控制器下面。但前提是,实际以太网的能力提升之后,同时与TSA保证底层,中间件的算法可以保证上层应用,会实现真正的中央+区域,从而来降低整车成本。 简单梳理一下,中央+区域的挑战主要是合作模式发生了变化;第二是软件开发和集成问题,一个软件集成和开发跨了好几个部门,部门强调的问题很严重;敏捷的开发和涉及的工具流程存在问题;芯片、操作系统这种整合的关系主机厂能力是否具备;舱驾一体,未来真正可以实现舱驾的安全和舒适也是需要考虑的问题。 芯片堆算力已经快到冰点期了,我认为后摩尔时代软硬的协同是真正的指标,硬件和软件怎么好好结合起来,把功能发挥最大,把体验做到最好,包括芯片底层算法和工具链,怎么联合起来,是未来我们需要提升的地方。我们现在也在前瞻自研新的架构平台,和行业内顶流的公司合作,坚持合作加自研的方式。 (以上内容来自合众新能源智能化研究院数字架构部高级总监侯亚飞于2023年9月21-22日在2023第三届智能汽车域控制器与中央计算平台创新峰会发表的《实现中央计算+区域控制面临的挑战和机遇》主题演讲。) |
 |
中国锻压网官方微信:扫一扫,立即关注!
关注"中国锻压网",获取独家行业新闻资讯。 添加方法1: 在“添加好友”中直接添加微信账号:chinaforge 添加方法2: 微信中扫描左侧的二维码 |





